AI News
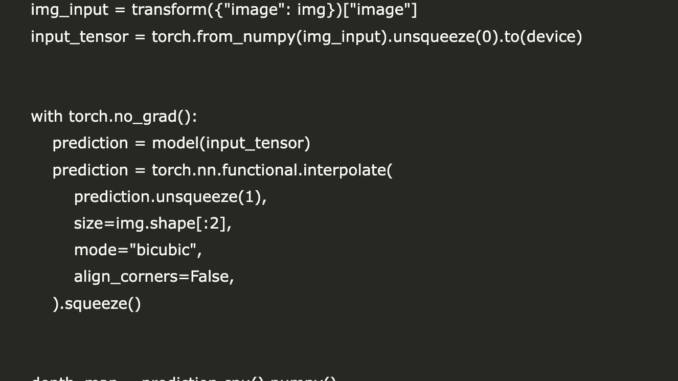
A Code Implementation of Monocular Depth Estimation Using Intel MiDaS Open Source Model on Google Colab with PyTorch and OpenCV
Monocular depth estimation involves predicting scene depth from a single RGB image—a fundamental task in computer vision with wide-ranging applications, including augmented reality, robotics, and 3D scene understanding. In this tutorial, we implement Intel’s MiDaS […]